
Pick&place for the food sector
The Veltru parallel kinematic robots and corresponding application supports proposed by K.L.A.IN.robotics enable system integrators to create complex pick&place operations through a simple process.
 Since January 2014, K.L.A.IN.robotics has been distributing on the Italian market the Veltru robot, which has applications in primary and secondary packaging, typically in the food industry, but also in cosmetics and pharmaceuticals. A rather common operational problem illustrates its functionality and advantages, explaining why the market has responded so positively to this new product. The story can be told as follows.
Since January 2014, K.L.A.IN.robotics has been distributing on the Italian market the Veltru robot, which has applications in primary and secondary packaging, typically in the food industry, but also in cosmetics and pharmaceuticals. A rather common operational problem illustrates its functionality and advantages, explaining why the market has responded so positively to this new product. The story can be told as follows.
The value of suction. The manufacturer of baked goods was beside himself. The cream tarts for hotels that he had just launched on the market were meant to be the ace up his sleeve, but to his surprise he found himself drowning in complaints. In fact, although he had invested in a latest generation packaging machine, not all the pastries were packaged in a perfect vacuum, and consequently arrived to the end customer damaged. The reason for this arose during the manual filling phase, when small quantities of cream came into contact with the packaging, getting on the edges and compromising the seal of the film coating».
The solution was offered by the packaging machine manufacturer, who suggested that the customer automate the filling phase in order to guarantee uniform production quality. The limited amortisation period and hopes of quickly solving such a crucial problem weighed in favor of this option, which, however, entailed various obstacles having to do with product manipulation, the need for reduced time cycles and limited space making possible the use of just one robot.
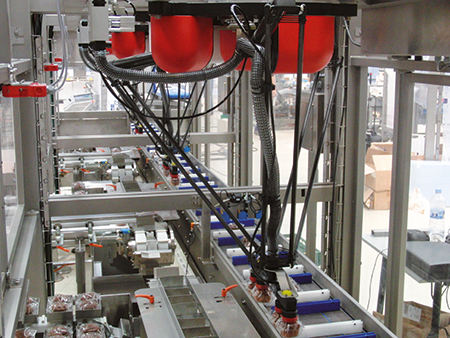
At this point the experience of Veltru AG came to the table. The builder of parallel kinematic robots managed to square the circle by proposing the use of a contactless suction cup. This solution made it possible to move the products by means of an air jet that keeps them suspended, reducing to a minimum any possible contact, while the packaging machine works in an intermittent cycle.
Kinematics and communication. The Delta robot enjoys the rightful title of the most successful parallel kinematic machine on the market. Developed during the early eighties by Reymond Clavel at the ETH in Lausanne, this type of kinematic machine quickly spread to the most diverse sectors, from IT (for example in the creation of mouses for 3D applications) to medical products.
market. Developed during the early eighties by Reymond Clavel at the ETH in Lausanne, this type of kinematic machine quickly spread to the most diverse sectors, from IT (for example in the creation of mouses for 3D applications) to medical products.
Especially well-known are the robots used in the manufacturing industries, in which pick&place systems with extremely reduced time cycles are indispensable. Indeed, these robots are adept at performing dynamic motion and are used in applications in which it is necessary to manipulate many individual products, both to order them when they arrive in a jumble and when they require precise manipulations, and thus typically in handling and primary and secondary packaging for consumption goods, food first and foremost.
In such cases, robotics has the sole purpose of linking the various processes and guaranteeing the flow of materials; often, however, in spite of his high dynamicity and number of cycles, a single robot does not suffice, and the work is thus distributed among several machines. In both cases, high capacity and efficiency of communication between robots is fundamental.
In praise of simplicity. To builders of machinery and installations K.L.A.IN.robotics (www.klainrobotics.com) and Veltru AG make available software and robot modules designed as pre-integrated units. The drive system is based on a CoDeSys V3 environment, then Soft-SPS: not only sector specialists, but also machine assistance technicians can quickly acquire mastery.
Platform programming of both motion control and logistics and peripherals, as well as communication and instructions, facilitates the task of management engineers. Veltru offers them a variety of modules for various functions in the form of compiled libraries, as well as a complete sample application, as a training tutorial and source code project.
A characteristic of drives so conceived lies in the possibility of executing a complete logical simulation of some modules even without hardware, and thus before the facility is physically built. And for picking lines formed by multiple robots, picking strategies can be optimized offline.
 Managing complex situations. A recent design involves, at a speed of 600 pcs/min, products that are first wrapped and then packed in boxes in variable positions by a lateral loader. Veltru D12H robots transport the packagings, their drive mechanism also coordinating the entire logistics, from packaging machine to the loader in question.
Managing complex situations. A recent design involves, at a speed of 600 pcs/min, products that are first wrapped and then packed in boxes in variable positions by a lateral loader. Veltru D12H robots transport the packagings, their drive mechanism also coordinating the entire logistics, from packaging machine to the loader in question.
The dynamic is as follows: the packaged products are put on chains and then immediately divided into groups. The robots pick the products from the intermittent motion chain with a four-claw gripper and positions them on the lateral loader. If a robot is not in the receptive position, it fills a accumulation belt and can restart to picking from the feed station, thus compensating for those small gaps in productivity of single machines (load balancing).
There are many advantages to this solution. Open programming, thanks to the use of tested basic functions, enables quickly creating various special functions. Furthermore, the grouping chain is controlled by a C10 Controller of the Veltru robot that is thus able to correctly follow its accelerations; the drive of the buffer and corresponding expansion, including pick&place logic, is controlled entirely through Veltru Soft SPS. Each robot alerts others to gaps filled by the lateral loader; in such a way, it is not necessary to follow a pre-set positioning model, and a stalling robot can be compensated by the others, guaranteeing optimal yield of the entire facility.











