
Simulating a picker line
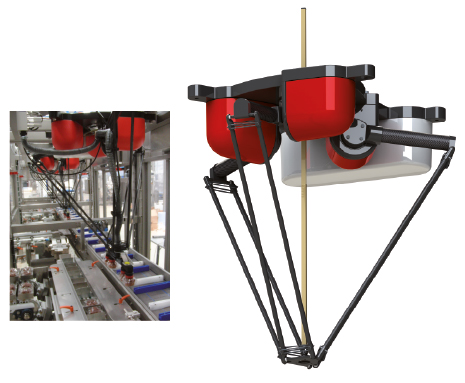
New and interesting mechatronic opportunities for primary and secondary packaging in the food, cosmetics and medical sector: parallel kinematic Veltru robots, that since 2014 have been distributed in Italy by K.L.A.IN.robotics.
 The applicative supports offered by Veltru have been made to significantly simplify the work of machine and system builders committed to solving complex pic&place problems, thus permitting application engineers to “concentrate” on the specific commercial aspects and on customer service.
The applicative supports offered by Veltru have been made to significantly simplify the work of machine and system builders committed to solving complex pic&place problems, thus permitting application engineers to “concentrate” on the specific commercial aspects and on customer service.
The SW platform. One of the trump cards which enables the attaining of optimum and high levels of integration and, hence, very flexible solutions, is the SW platform chosen by Veltru for the development of packaging applications, or that is the CoDeSys environment.
Technicians, application engineers and programmers are familiar with the PLC world, and this is one of the reasons that prompted the manufacturer to use this platform to manage their parallel kinematic robots. With the CoDeSys display system it is indeed possible to run an entire picking line with a single robot controller. The integrated offline simulation also allows you to significantly increase the efficiency of packaging systems.
Correct handling. In the consumer goods handling or packaging stages - in food, cosmetic or medical fields - production volumes often require the use of multiple robots. The set of different robots used in the same production flow is usually defined as a picker line. Proper handling of the products is the pre-requisite for achieving efficient picker lines and the main focus of the implementation becomes the accurate management of product flow.
A counter-flow application. The case proposed - for a line of products derived from dairy products - is emblematic of Veltru’s management and constructive philosophy.
A manufacturer needed to feed 1,200 products/min on the machine for subsequent packaging. Since two products could be picked up simultaneously, 600 pick and place operations per minute were required. The packaging machine manufacturer cooperated with Veltru to optimize the application, opting for a system composed of five Veltru D12H model robots with counter-flow configuration, where each robot performs an average of 120 cycles/min.
In a counter-flow configuration, the product flows and pockets to be filled are arranged in parallel but moving in opposite directions.
In practice, the first robot always has products to be picked up and fills the first pockets. The last robot picks up the remaining products but at any rate has empty pockets to fill. Indeed any deviation that may impede the linear distribution flow of the quantity of products within the system would cause disturbances, resulting in alternate overcapacity and overload. Load balancing is a control feature to manage these waves.
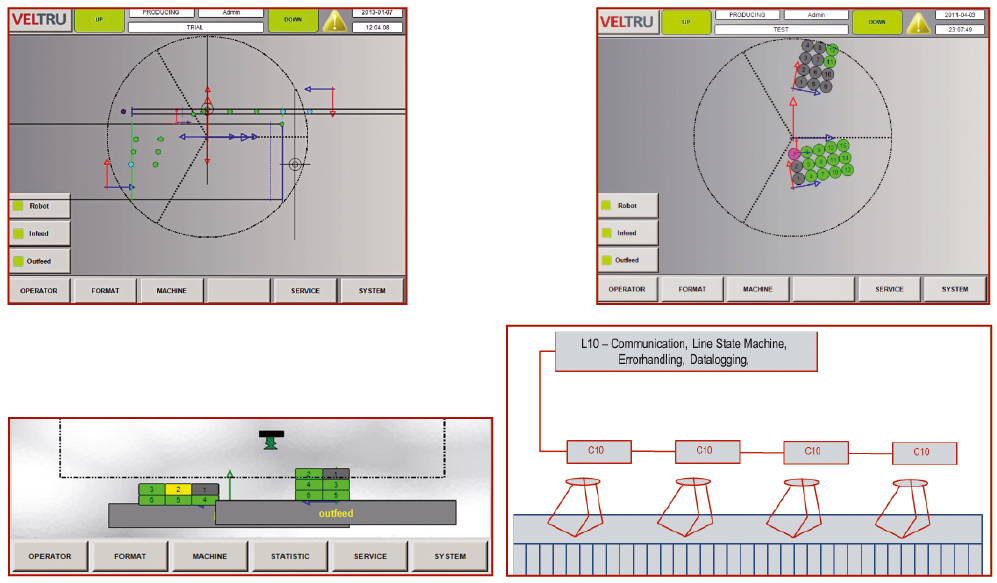
Efficiency and balance. Veltru uses display elements for all of its software modules, both on the C10 Robot Controller as well as on the L10 Line Controller. The integrated CoDeSys V3 Visualization makes it much easier to access the control data and create powerful visualizations of very dynamic processes. Veltru has enhanced these possibilities to support the simulation of entire picker lines. For initial system design, a simplified application can be used. For the optimization of real picker line installations, all hardware components can be simulated and the line can be fully operated with the original software in simulation mode. This allows fast iteration cycles for the optimization process, with minimum costs. Since error conditions can also be displayed, an unprecedented degree of system optimisation is reached in terms of picking line and load balancing efficiency.











