
The potential of XTS
Thanks to EtherCAT (the fastest industrial Ethernet currently available), Beckhoff has managed to develop and build the new eXtended Transport System technology: another milestone set in place by a concern used to leading the future.
 XTS by Beckhoff is an “all in one” mechatronic system that combines the advantages of two standard drive mechanisms: rotary and linear systems. |
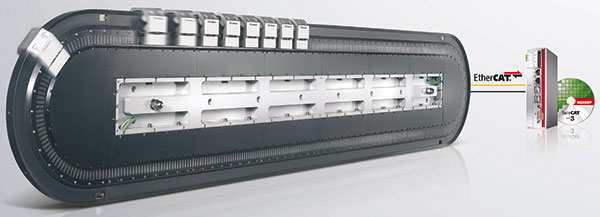
 Power: internal connection, power modules and EtherCAT. |
The XTS - eXtended Transport System developed by Beckhoff combines the advantages of two tested drive mechanisms, which is to say rotary and linear systems. The motor is completely integrated with power electronics and a motion sensor; one or more wireless movers move dynamically along a free and flexible pathway configuration, at speeds up to 4 m/s.
This represents an epochal change for motion control: in a constructive and compact form, XTS enables designing totally new machinery concepts.
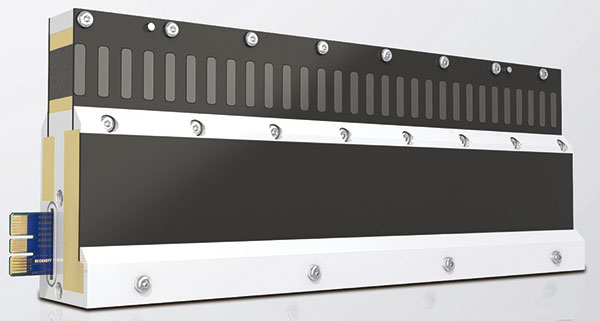
XTS is a mechatronic system that “contains” everything necessary for functioning: a modular linear motor, completely integrated with power electronics and a motion sensor in a single device; one or more movers, a mechanical guide; an industrial PC with TwinCAT control software.
A tech challenge. What makes XTS special is the fact that the drive control loops cannot be closed locally in the distributed modules, because the movers are powered by rollers and sequential solenoids. The amplifiers in the modules control various rollers and solenoids and must manage a constantly changing number of movers. Since the dynamic properties of the movers have to be exceed the limits of the single module, control must be centralized in order to dislocate the groups from one module to the next with sufficient regularity and fluidity of motion.
The XTS solution features a number of positioning sensors and rollers. A motion sensor is placed every 30 mm, and, like the rollers, it is activated in a precise cycle of 250 s. Due to the resulting increase in work in the communication system, every 3 meters along the XTS it is necessary to transport approximately 80 Mbit/s of processing data with no jitters to or from the distributed modules. A high degree of precision is thus required in synchronizing these devices, along long distances and on multiple EtherCAT segments.
Dynamic high speed data processing. EtherCAT fully meets these requirements, thanks to the possibility of executing so-called “instant processing”, a mode in which each device in the network collects and writes data from the common data frames without first receiving, processing and re-sending the frames, as happens in other protocols.
The frames are processed in EtherCAT slave controllers during transfer, with practically no lag. In particular, in such a way, the usable EtherCAT network data rate exceeds 95% of the bit rate, because the Ethernet frame overhead does not appear for each device and direction, but only about once every 1500 bytes of data have been processed, which can be distributed to any number of devices. The 80 Mbit/s required is thus exceeded, even with 100 Mbit/s Ethernet.
Another advantage lies in the possibility of using the same frame for input and output data, as well as in the available bandwidth in full duplex mode. In other words, a 100 Mbit/s band essentially becomes 200 Mbit/s. The EtherCAT slave controllers process the frames in hardware and thus make available processing data to the local application immediately after the frames have crossed them: for the EtherCAT protocoll, the protocol stack cycles are irrelevant. Moreover, the high precision clocks in the slave controllers are synchronized to generate a common system clock whose precision is independent of master frame transmission jitters. In such a way, EtherCAT reaches a precision in the synchronization of distributed devices that reaches double digits in nanoseconds, making the use of special hardware in the master group competely unnecessary.
Since the frames are transferred without affecting the chip software, EtherCAT offers a a minimal and constant lag.
That means that the lag can be easily eliminated by acting mathematically during synchronization of the clocks distributed in the devices.
Finally, it’s worth mentioning that, EtherCAT can always be physically connected point by point and every EMC interference disappears with the subsequent device. Thus, in spite of the high data rate, this proves an unusually robust protocol. In the (unlikely) event that a malfunction leads to a bit error, the CRC controls enable reliable identification and localization.
The EtherCAT slave controllers offer up to 4 EtherCAT ports, meaning that any sort of configuration is supported, without requiring active infrastructure components like switches or hubs. EtherCAT has minimal hardware requirements in the master: an Ethernet standard port suffices, and no chip buses or communication co-processers are required.
XTS is a clear example of how an EtherCAT-based system approach would be unthinkable with conventional buses.











