
Robots and vision
A POWERFUL ALLIANCE Sight is the most complex of all the senses found in biological or artificial systems. At the same time vision provides the greatest benefit. There is a good reason that processing visual stimuli consumes the most energy in the brain, involving approximately 60% of the cerebral cortex. Abdelmalek Nasraoui*
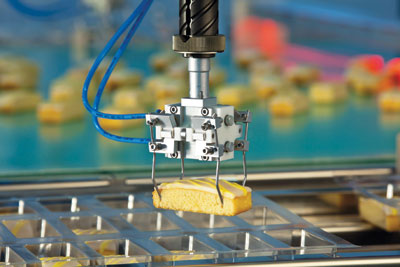
Extremely easy and yet complex. Before the robot shown in figure was able to pick up the piece of cake, there was a series of extremely complex tasks to solve. The piece of cake has to enter the range of the image recording sensor. In this case a Schubert reflected light scanner is used: corresponding to the continuous motion of the product belt, the reflected light scanner records individual image lines. The firmware assembles the image lines to a colour image. Related pixels are merged to depict the object.
The object can now be analysed. For example, depending on the task, customised analysis algorithms compute the product type, the location of the product, its orientation and specific product characteristics. The robot’s release to pick up is based on this.
For the cake illustrated here, additional quality control algorithms were implemented. They check for even application of the white cream, the number and quality of the chocolate stripes and the overall flawless condition of the product. Each of these steps must be described using formal functions which are normally based on numerical and statistical mathematics.
Any child instantly knows which one is the “best” piece of cake. In contrast, machines need to calculate for a long time before being able to make the right decision. The broad range of applications which can be achieved now weren't possible until intelligent machines mastered the sequence of “Seeing, Deciding, Acting” using flexible robot vision systems. At Schubert, this breakthrough was already achieved in the early 1980s.
Flexible lines, modular design
Even in two-dimensional object recognition, there is not a generally valid approach for all conceivable products like there are for packaging robots. There can be various products with differing textures, packaging materials, etc. as part of a single application. However, it must still be ensured that each individual product is always visible in the image including its entire outline and its complete surface. This is the only way that complete localization is possible wincluding quality control.
In order to guarantee proper production, solutions for object recognition must be defined in a packaging line’s very early planning stages. Selecting the conveyor belts as an image background, the type and colour of lighting and the colour sensors and colour spaces to be used are all crucial for the reliability and safety of the line.
This is only possible due to the modular design of the system components to configure the corresponding image processing system based on the application. The Schubert scanner technology is a modular system concept like this. With it, possibilities can even be created in advance to allow freedom for marketing ideas and developing new products. The software level is also modular. The user friendliness of the system remains the top priority. It begins with the clear structure of the concept which is reflected in the graphic interface and handling of the system and product parameters. A system which cannot be operated by laymen is useless in production plants. The complexity has to be kept hidden - despite maintaining the full functionality of the overall system. Schubert image processing is based on these kinds of software concepts.
The future is stereo
Despite state-of-the-art computer technology, there, still, are requirements which reach the limitations of feasibility. Analysing product texture in the food industry or evaluating the surface quality of a workpiece can be particularly challenging.
In some cases, additional effort is required to guarantee sturdy character recognition and verification. This can mean additional hardware components and special software modules or complicated lighting devices, etc. However, more additional components which are often customised and usually complicated make the system less user friendly, while also making it much harder to service and inevitably violating the modularity principle. The most simple solutions are still the best ones, and you just need to find them. Three-dimensional image processing is currently on the verge of general use in production lines. Both triangulation and a stereo approach are highly promising. Because of a number of advantageous characteristics of stereo image processing, especially regarding system design, handling and its wider range of applications, these systems will be used in practice in the near future. To cut your own path often leads to innovative products. The Schubert 2D Scanner is one of these innovative products. The Schubert 3D Scanner is an innovative product of the future.
Abdelmalek Nasraoui Director of Research and Development Vision Gerhard Schubert GmbH











